
Capitan XCR-C: 面板安装,CANopen 伺服驱动器Capitan XCR CANopen 伺服驱动器亮点适用于关键尺寸机器人应用的微型设计
超低待机功耗
双回路支持,实现无与伦比的精度
PWM 频率高达 200 kHz,适用于低电感电机
超快的伺服回路,确保平稳运行
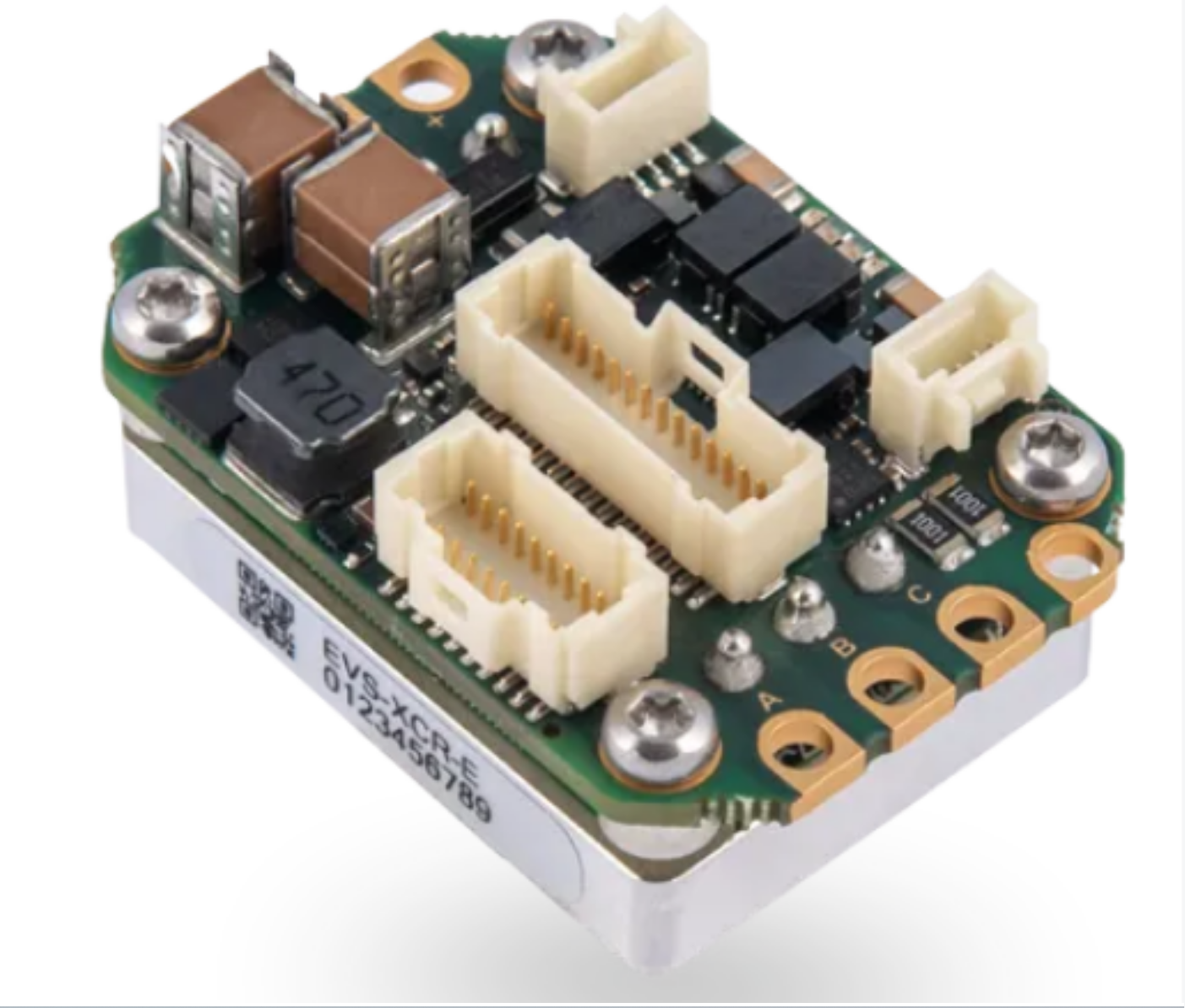
探索 Capitan XCR CANopen 伺服驱动器
Capitan XCR 是一款超紧凑、即用型、高功率密度的CANopen 伺服驱动器。经过优化,具有极低的外形和轻质,可轻松集成到紧凑型机器人关节、扁平致动器、末端执行器、手术机器人、外骨骼、万向节和触觉应用中。Capitan XCR 伺服驱动器采用世界上的晶体管技术设计,可提供的功率密度和效率。PWM 频率高达 200 kHz,同时保持可忽略不计的 EMI,提供的性能。
Capitan XCR 的变体也可用于EtherCAT 通信。
机器人关节和执行器集成Capitan XCR 可随时集成到机器人关节或执行器内,并且可以通过提供的螺丝孔轻松固定到您的机械外壳上。其铝制框架可确保散热。
双电源或单电源Capitan XCR 可以由单电源或双电源(单独的逻辑和电源)供电。使用具有低逻辑电压的双电源,可以降低驱动器在待机模式下的功耗。
针对性能进行了优化Capitan 系列 EtherCAT 通信延迟已经过优化,可限度地提高系统响应能力。降低了待机功耗以限度地减少热量产生,固件架构设计为可适应高达 200 kHz 的 PWM 频率,从而实现低电感电机控制。
菊花链式 BiSS-C 编码器用一根电缆连接两个高分辨率编码器不是很好吗?Capitan XCR 支持 BiSS-C 编码器的菊花链连接,可实现简单的设计,帧尺寸为 64 位(位置数据总共 32 位)。